

валя
.pdfМинистерство транспорта Российской Федерации Федеральное агентство железнодорожного транспорта Федеральное Государственное бюджетное образовательное учреждение высшего образования
«Дальневосточный Государственный университет путей сообщения»
Кафедра «Транспортно-технологические комплексы»
КУРСОВАЯ РАБОТА по дисциплине «Теория механизмов и машин»
на тему «Исследование рычажного механизма»
КР 23.05.03.125 ПЗ
Студент гр.125 |
Яковлев В.Е. |
Руководитель |
Поспелов А.И. |
Хабаровск – 2019

1 |
Оглавление |
|
|
Введение. .................................................................................................................... |
3 |
||
1. |
Структурный анализ рычажного механизма ...................................................... |
4 |
|
2. |
Кинематическое исследование рычажного механизма ..................................... |
6 |
|
2.1. |
Построение плана скоростей.................................................................... |
7 |
|
2.2 |
Построение плана ускорений ................................................................ |
10 |
|
3.Кинетостатический расчёт рычажного механизма ........................................... |
14 |
||
3.1. |
Определение нагрузок............................................................................. |
14 |
|
3.2. |
Расчет сил инерции звеньев механизма ................................................ |
16 |
|
3.3. |
Расчет группы звеньев 2-3 ...................................................................... |
17 |
|
3.4. |
Расчёт группы звеньев 4-5 ...................................................................... |
19 |
|
|
3.5. |
Расчет входного звена. ......................................................................... |
20 |
4. |
Заключение .......................................................................................................... |
21 |
|
5. |
Литература ........................................................................................................... |
23 |
|
|
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
Изм |
Лист |
№ докум. |
Подпись |
Дата |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разработ. |
Яковлев В.Е. |
|
22.04.19 |
|
Литер. |
|
Лист |
Листов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проверил |
Поспелов А.И. |
|
|
Исследование рычажного |
У |
|
2 |
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зав. каф. |
|
|
|
|
|
|
|
|
||
|
|
|
|
механизма |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н. контр. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Утвердил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введение.
Объектом исследования данного курсового проекта является рычажной механизм дизель воздуходувной установки.
Для реализации целей курсового проекта были решены следующие задачи:
-проведен разносторонний анализ рычажного механизма;
-начерчены соответствующий заданию план скоростей и план ускорений;- произведён силовой расчет в заданном положении.
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
3 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|
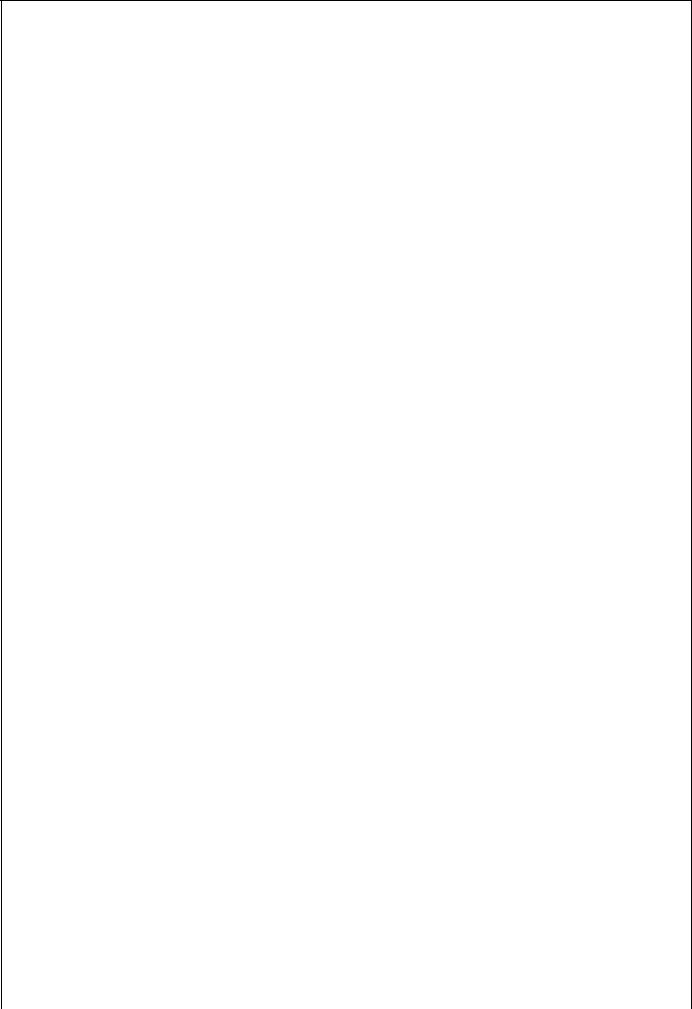
1. Структурный анализ рычажного механизма
|
|
|
|
|
C S |
|
|
|
|
|
|
|
5 |
|
|
|
B S |
|
|
|
|
3 |
|
2 |
90 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
S |
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 S |
A |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Рисунок 1 Схема рычажного механизма 1- кривошип |
|
||||
|
|
|
2,4- шатуны 3,5- ползуны |
|
||
|
Определяем степень подвижности по формуле Чебышева |
|
||||
|
W = 3n − 2P − P |
, |
|
|
|
|
|
5 |
4 |
|
|
|
|
P = 0 |
|
|
|
|
5 |
|
|
где n-число подвижных звеньев: n=5, P-число кинематических пар: P = 7, |
|||||
4 |
|
|
|
|
|
|
|
|
|
W = 3 ∙ 5 − 2 ∙ 7 = 1 |
|
(1.1) |
|
Из соотношения (1.1) следует, что кинематическая цепь должна иметь одно входное звено – кривошип 1, чтобы движение всех остальных звеньев было бы определенным
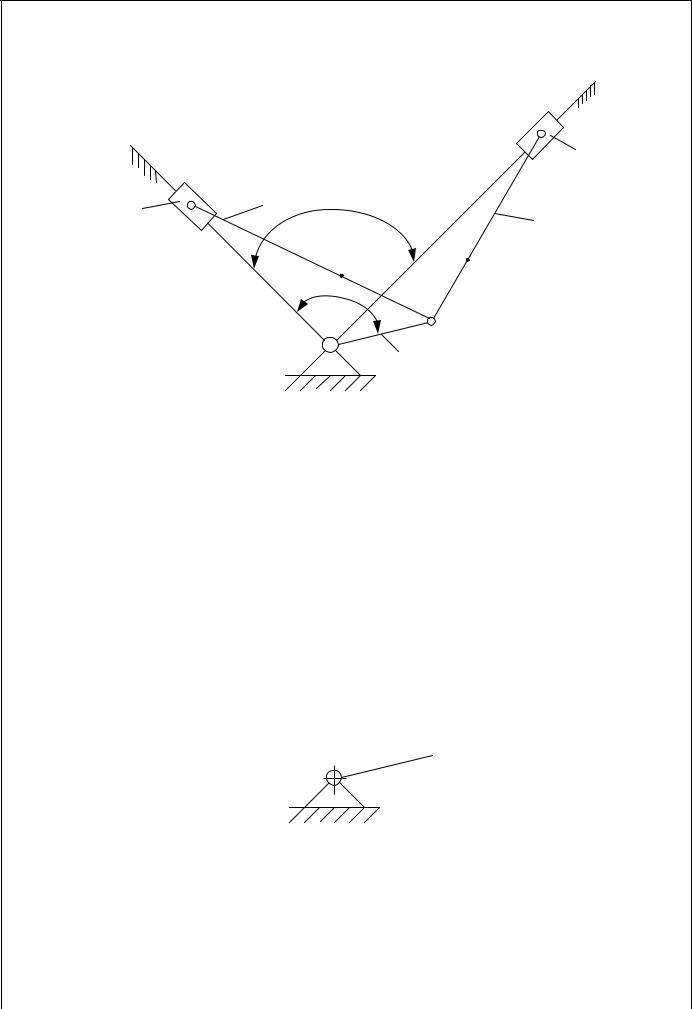
1.1.1. Разбиваем механизм на группы Ассура
Рисунок 2. Основной механизм Ассура
Определяем степень подвижности по формуле Чебышева
W = 3n − 2P5 − P4,
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
4 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|
P = 0 P5 = 1
4 где n-число подвижных звеньев: n=1, P-число кинематических пар: ,
W = 3 ∙ 1 − 2 ∙ 1 = 1
B S
2
3 
A
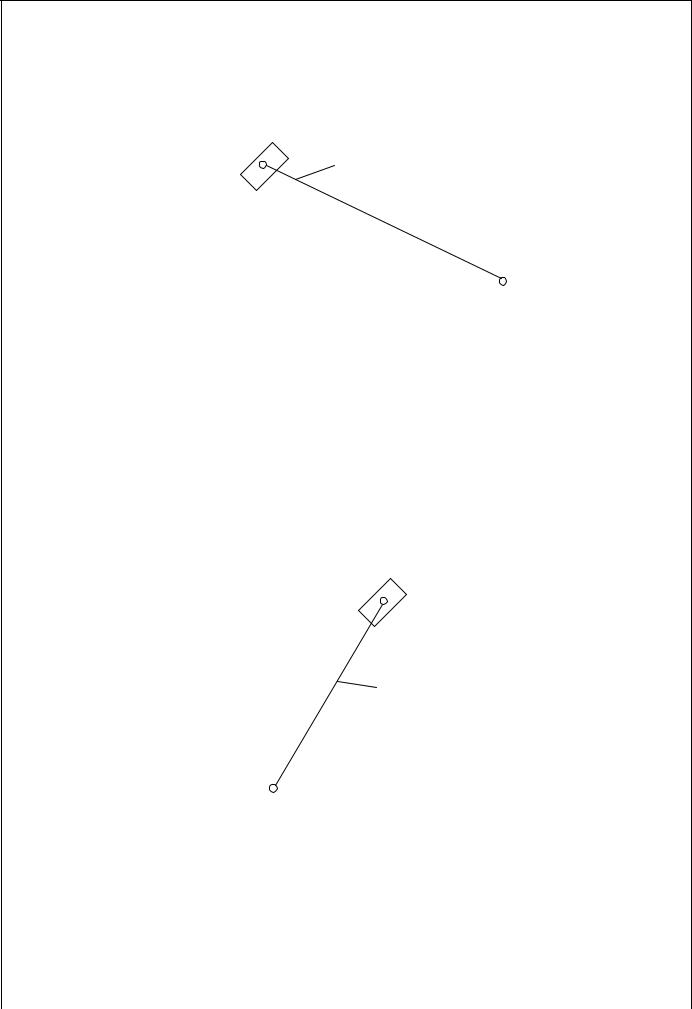
Рисунок 3 Группа Ассура 2-3
Определяем степень подвижности по формуле Чебышева
W = 3n − 2P5 − P4,
P = 0 P5 = 3
4 где n-число подвижных звеньев: n=2, P-число кинематических пар: ,
W = 3 ∙ 2 − 2 ∙ 3 = 0
Группа второго класса, второго порядка.
C S
 5
5
4
A
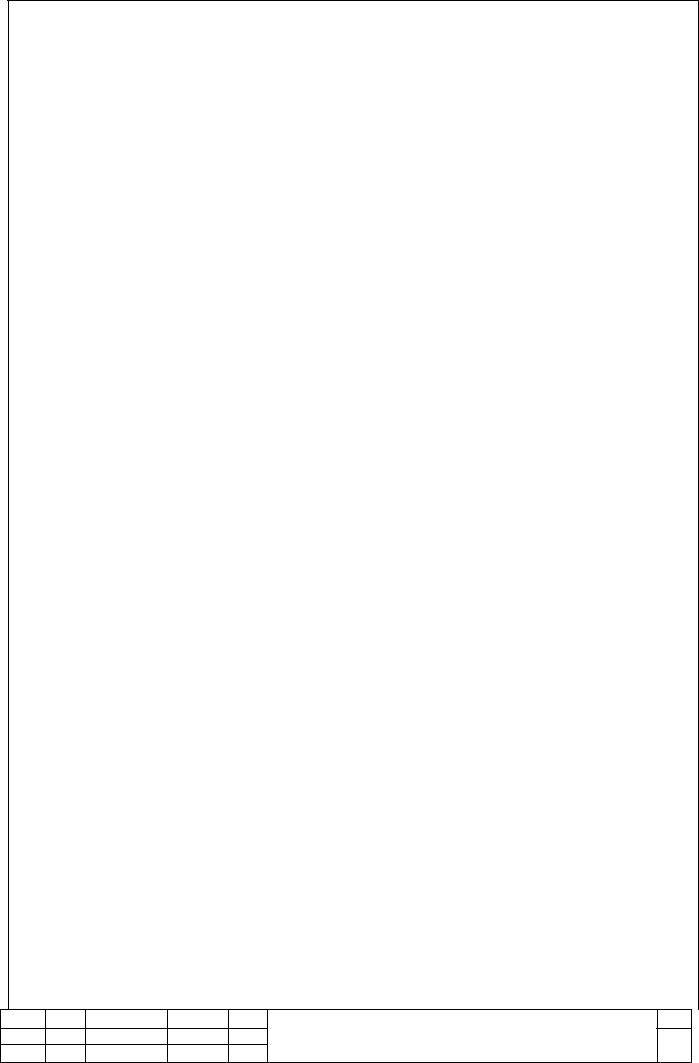
Рисунок 4 Группа Ассура 4-5
Определяем степень подвижности по формуле Чебышева
W = 3n − 2P1 − P2,
P2 =где0 n-число подвижных звеньев: n=2, P-число кинематических пар: P1 = 3,
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
5 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|

W = 3 ∙ 2 − 2 ∙ 3 = 0
Группа второго класса, второго порядка.
Поскольку обе группы Ассура являются группами 2-го класса, то механизм относится к механизму 2-го класса
2. Кинематическое исследование рычажного механизма
Исходные данные:
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
6 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|

|
ℓ =0,07 м, ℓ = ℓ =0,30 м, |
|
||||||||
|
– схема рычажного механизма дизель воздуходувной установки. |
|||||||||
|
– частота равномерного вращения входного кривошипа |
=2200 об/мин; |
||||||||
|
– положение механизма для расчета соответствует обобщенной координате |
|||||||||
=60°. |
|
|
|
|
|
|
|
|
|
|
|
Определим масштабный коэффициент, как отношение реальной длины звена к |
|||||||||
длине отрезка на чертеже в мм. |
|
|||||||||
|
Пусть на чертеже ОА=30 мм, из условия задания OA=0,07 м |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Масштабный коэффициент , м/мм, находим по формуле |
|||||||||
= ℓ |
|
/ОА, |
|
|
(2.1) |
|||||
|
|
|
|
|
|
|
|
|||
|
где ℓ – истинный размер звена OA, мм; ОА– размер звена OA на |
|||||||||
чертеже, мм. |
|
|
|
|||||||
= 0,07 |
= 0,0023 м/мм. |
|
|
|||||||
ℓ |
30 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
̅ |
|
|
Определяем масштабные значения ℓ , мм, длин звеньев по формуле |
|||||||||
= ℓ |
АВ |
/ , |
|
|
(2.2) |
|||||
|
|
|
|
ℓ |
|
|
|
|||
l = |
0,30 |
|
|
|
= 130,4 |
м⁄ |
|
|
||
Подставив значения в формулу (2.2) получим: |
|
|||||||||
|
0,0023 |
|
мм |
|
|
|||||
|
|
|
|
|
||||||
|
Методом засечек строим план механизма для заданного положения = |
|||||||||
90°. Число планов, соответствующих полному обороту кривошипа OA, |
||||||||||
примем 12. Строим остальные одиннадцать планов механизма для |
||||||||||
последовательных равноотстоящих положений входного звена. |
||||||||||
|
Находим последовательно положения центров масс S звеньев и, соединяя |
|||||||||
эти точки плавными линиями, строим их траектории движения. |
||||||||||
|
Вычерчиваем отдельно кинематическую схему механизма для заданного |
|||||||||
положения входного звена |
= 120°. Исследование кинематики механизма |
|||||||||
выполняем с помощью планов скоростей и ускорений.
2.1.Построение плана скоростей
Выбираем произвольный полюс р.
Определяем направление скорости ведущего звена.
(Она направлена перпендикулярно кривошипу в сторону вращения угловой скорости.)
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
7 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
̅̅̅ |
|
̅̅̅ |
̅̅̅̅̅̅ |
|
|
|
|
|
|
|
|
||
|
2.1.1. |
|
|
Определим скорость точки A |
|
|
|
|
||||||
|
|
= |
|
+ |
|
, |
|
|
|
|
|
|
|
|
|
|
̅̅̅ |
/ |
|
̅̅̅̅̅̅ |
– скорость точки А относительно О. |
||||||||
|
|
|
|
|
|
|
|
/ |
||||||
|
где |
|
–скорость точки О, |
|||||||||||
|
= 0 |
|
V = |
= ω ∙ L |
|
|
|
|
|
|||||
|
V |
= ω |
∙ L A |
, |
/ |
1 |
OA |
|
|
|
|
(2.3) |
||
|
A |
|
|
1 |
OA |
|
|
|
|
|
|
|
|
|
|
|
|
OA |
|
|
|
|
|
|
|
|
|
|
|
|
где L |
|
− заданная длина кривошипа, м. |
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Угловая скорость вращения кривошипа |
|
находится по формуле: |
|
||||||||||
|
|
|
|
|
|
|
|
= |
, |
|
|
|
(2.4) |
|
|
|
|
|
|
|
|
|
1 |
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где n1 |
-частота вращения кривошипа (число оборотов в минуту). |
|
|||||||||||
|
Подставив в формулу (2.4) свои значения ,получим: |
|
||||||||||||
|
ω |
= |
3,14∙2200 |
= 230,38 1⁄ |
|
|
|
|
|
|
||||
|
1 |
|
|
|
30 |
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставив найденные величины в формулу (2.3) найдем скорость А: |
|||||||||||||
|
V |
= 230,38 ∙ 0,07 = 16,13 |
м⁄ . |
|
|
|
|
|||||||
|
A |
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
Определяем масштабный коэффициент плана по формуле |
|
||||||||||||
|
Kv = ̅̅̅̅VA |
|
, |
|
|
|
|
|
|
|
(2.5) |
|||
|
|
|
V |
|
|
|
|
|
|
|
|
̅̅̅ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
̅̅̅ |
|
|
|
где V - действительное значение скорости, V векторное значение |
|
||||||||||||
скорости. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принимаем векторное значение скорости V =100 мм. |
|
||||||||||||
K = 16,13 |
= 0,16 |
м⁄ |
|
|
|
|
|
|
|
|||||
|
Подставив найденные значения в формулу (2.5) получим : |
|
||||||||||||
v |
|
100 |
|
|
c ∙ мм |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
2.1.2. Определяем скорость точки B:
Для этого составим и решим систему двух уравнений: |
|||||||||||
|
|
V |
|
= V |
|
+ VB |
|
|
|||
{ |
|
|
B |
|
A |
|
⁄A |
|
, |
||
̅̅̅̅ |
|
̅̅̅̅ |
|
|
|||||||
|
|
̅̅̅̅̅̅̅̅ |
|||||||||
|
V |
|
|
= V |
|
|
+ V |
|
|
|
|
|
B |
3 |
|
B |
B /B |
6 |
|
||||
|
|
|
|
|
|
6 |
|
3 |
|
||
КР 23.05.03.125
Изм Лист № документ Подпись Дата
Лист
8

где VB -вектор абсолютной скорости точки B , VB⁄A – вектор скорости точки
B во вращательном движении звена 2 относительно точки A .
Из полюса проводим линию, параллельную направляющей. Из т. а
проводим линию перпендикулярную АВ. На пересечении этих линий получим |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точку b. |
b- скорость точки В |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
⁄A |
|
|
Получив на плане скоростей масштабные значения скоростей V |
|
в виде |
|||||||||||||||||||||||
|
, VB |
|||||||||||||||||||||||||
V |
= K |
|
|
∙ V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
отрезков |
|
b и ab , измеренных в миллиметрах, находим эти скорости, м/с: |
|
|||||||||||||||||||||||
B |
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
VB |
|
= K |
v |
∙ V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
⁄A |
|
|
|
|
|
|
|
|
|
/ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
VB⁄ = 0,16 ∙ 34 = 5,44 |
⁄ |
|
|
|
|
|
||||||||||||||||||||
|
с |
|
|
|
|
|
||||||||||||||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м⁄ |
|
|
|
|
|
|
V |
= 0,16 ∙ 94 = 15,04 |
|
|
|
|
|
|
|||||||||||||||||||
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
2.1.3. Определяем скорость точки С |
|
|
|
|
|
||||||||||||||||||||
|
{ |
|
V = V + VС |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
С |
|
|
|
|
|
|
|
|
A |
|
|
|
|
⁄A |
, |
|
|
|
|
|
|
|
|
|
|
̅̅̅̅ |
|
|
|
|
̅̅̅̅ |
|
|
̅̅̅̅̅̅̅̅ |
|
|
|
|
|
|
|
|||||||||
|
|
V |
|
|
= V |
|
+ V |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
С5 |
|
|
|
|
|
|
|
С6 |
|
|
С5/С6 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– вектор скорости |
||||||
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
⁄A |
||||||||
|
|
|
где V − вектор абсолютной скорости точки C, VC |
|||||||||||||||||||||||
точки C во вращательном движении звена 4 относительно точки
A
. Из полюса
проводим линию, параллельную направляющей. Из т. а проводим линию |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярную АС. На пересечении этих линий получим точку с. с - |
|||||||||||
скорость точки С. |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
⁄A |
|
||
|
Получив на плане скоростей масштабные значения скоростей V |
, VC |
в виде |
||||||||
V |
= K ∙ V |
|
|
|
|
|
|
|
|||
отрезков |
c и ac, измеренных в миллиметрах, находим эти скорости, м/с: |
|
|||||||||
С |
|
v |
|
С |
|
|
|
|
|
|
|
VС |
|
= K |
v |
∙ V |
|
|
|
|
|
|
|
⁄A |
|
С/ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
V |
= 0,16 ∙ 34 = 7,8 |
м⁄ |
|
|
|
|
|
|
|||
С |
|
|
|
|
с м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VС⁄ = 0,16 ∙ 94 = 15,04 |
⁄ |
|
|
|
|
||||||
|
с |
|
|
|
|
||||||
|
A |
|
|
|
|
|
|
|
|
|
|
2.1.4.Определяем скорости центров масс звеньев, строим векторы их скоростей, используя свойство подобия.
|
|
|
|
|
|
Лист |
|
|
|
|
|
КР 23.05.03.125 |
|
|
|
|
|
|
9 |
|
Изм |
Лист |
№ документ |
Подпись |
Дата |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
V |
|
|
= K |
|
̅̅̅̅ |
, |
|
|
|
|
|
||||
|
|
|
|
v |
∙ V |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|||
|
|
V |
|
|
= K |
|
̅̅̅̅ |
, |
|
|
|
|
|
||||
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
4 ̅̅̅̅̅ |
|
v |
|
S4 |
|
|
̅̅̅̅ |
̅̅̅̅ |
|
||||||
|
|
|
|
|
|
S2 |
|
|
̅̅̅̅ |
|
|
S3 |
|
||||
|
|
где V |
- вектор скорости центра масс звена 2, V |
вектор скорости центра |
|||||||||||||
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
S |
|
||
масс звена 3, V |
4 |
вектор скорости центра масс звена 4, V |
5 |
вектор скорости |
|||||||||||||
|
|
|
|||||||||||||||
центра масс звена 5. |
|
|
|
|
|
||||||||||||
|
|
Получив на плане скоростей масштабные значения скоростей, измеренных в |
|||||||||||||||
миллиметрах, находим эти скорости, м/с |
|
|
|
|
|||||||||||||
V |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
V 1 |
= 0,16 ∙ 98 = 15,68 м/с |
|
|
|
|
|
|||||||||||
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
= V |
=15,04 м/с |
|
|
|
|
|
||||||||||
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
5 |
= 0,16 ∙ 72 = 11,52 м/с |
|
|
|
|
|
||||||||||
V |
3 |
= V |
=5,44 м/с |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.1.5. Определяем угловые скорости звеньев |
|
|
|
|||||||||||||
|
|
ω |
2 |
= VB⁄A |
|
|
; ω = Vc⁄A |
, |
|
|
(2.6) |
||||||
|
|
|
|
LAB |
|
|
4 |
LAc |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где LAB, LAC – заданная длина звена 2 и 4 соответственно, м. |
|||||||||||||||||
ω2 |
= |
|
5,44 |
= 18,13 1⁄с |
|
|
|
|
|
||||||||
|
|
|
|
0,30 |
|
|
|
|
|
|
|
|
|
|
|
||
ω4 |
= |
|
15,04 |
= 50,13 1⁄с |
|
|
|
|
|
||||||||
|
|
|
|
|
0,30 |
|
|
|
|
|
|
|
|
|
|
|
|
2.2 Построение плана ускорений
2.2.1. Определяем ускорение в точке А |
|
|
|
|||||||||
aA |
= aA⁄ |
= ω1 |
∙ l |
|
|
|
||||||
|
|
|
|
n |
2 |
|
|
|
|
|
|
|
a |
A |
= an 0 |
= ω2 |
∙ l = 230,382 ∙ 0,07 = 3715,25 |
м⁄ |
2 |
|
|||||
|
|
|
A⁄ |
1 |
|
OA |
с |
|
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
Определяем масштабный коэффициент плана |
|
|
||||||||
Ka = a̅aA |
, |
|
|
|
|
|
(2.7) |
|
||||
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
А |
|
|
где a |
|
- истинное значение ускорения точки А , ̅̅̅а - векторное значение |
|
|||||||||
которое мы примем равным 80 мм. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лист |
|
|
|
|
|
|
|
|
|
КР 23.05.03.125 |
|
||
|
|
|
|
|
|
|
|
|
10 |
|||
Изм |
Лист |
№ документ |
|
Подпись |
Дата |
|
|
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|