

лр2-2
.docx

Лабораторна робота 2
Тема роботи: Основні принципи регулювання.
Мета роботи: вивчити основні принципи регулювання та зробити їх порівняльний аналіз.
ЗАВДАННЯ ДО ВИКОНАННЯ ЛАБОРАТОРНОЇ РОБОТИ
Зняти криві розгону триємнісного об’єкта (три послідовно з’єднані аперіодичні ланки І порядку) окремо за каналами керування та обох збурень і визначити параметри об’єкта (Коб, Тоб, τзп) за цими трьома каналами.
Створити системи автоматичного регулювання (САР) за відхиленням, збуренням та комбіновану. Зробити порівняльний аналіз отриманих перехідних процесів.
ВИКОНАННЯ РОБОТИ
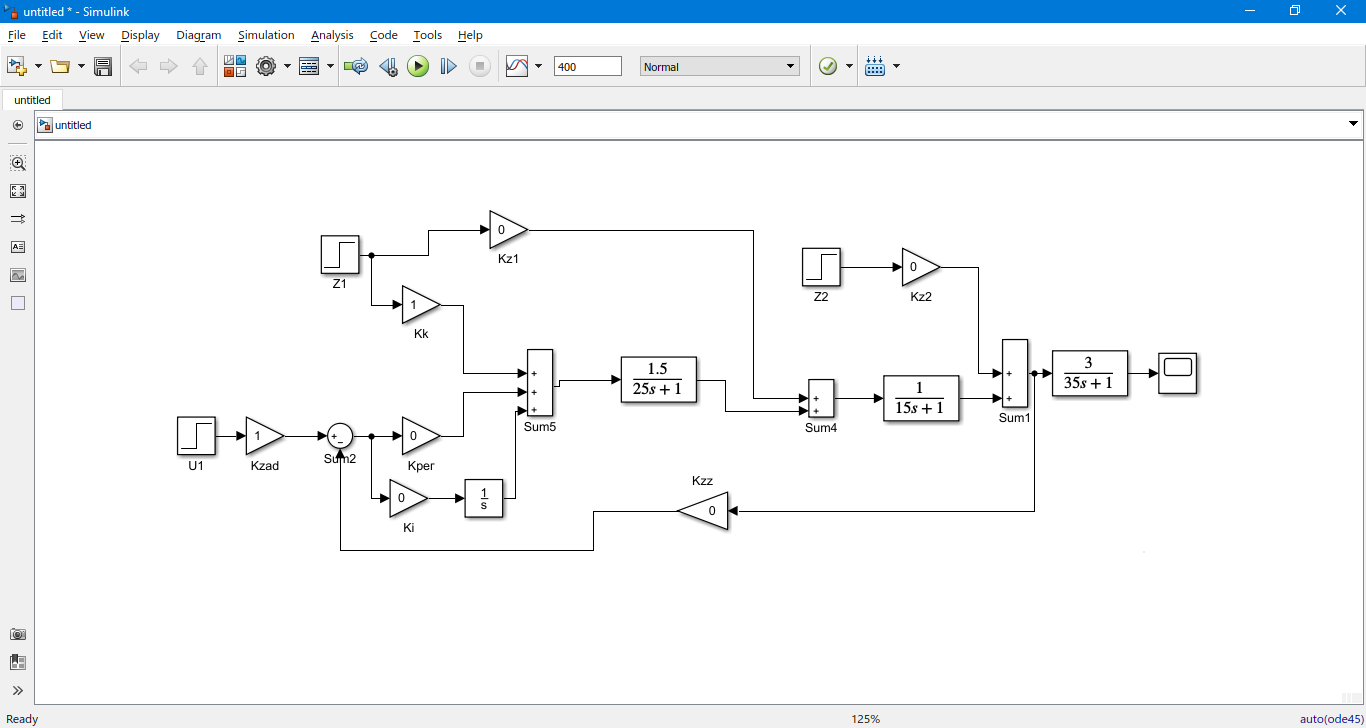
Рисунок 1 – Структурна схема системи автоматичного регулювання
Таблиця 1 – Параметри об’єкта (коефіціенти передачі Кі і сталі часу Ті).
|
Варіант 2 |
|
|
1-ша ланка |
К1=1,5 Т1=25 |
|
|
2-га ланка |
К2=1 Т2=15 |
|
|
3-тя ланка |
К3=3 Т3=35 |
|
|
Зняття кривих розгону об’єкта за каналами керування та обох збурень. Для цього встановити параметри настроювання ПІ-регулятора (Kрег=0; Kі=0), розімкнути зворотний зв’язок (Kzz=0) і подавати послідовно ступінчате діяння (Final value = 10) на об’єкт за каналами:
управління, встановивши: Kz1=0; Kz2=0; Kk=1.

Рисунок 2 – Перехідний процес об’єкта за каналом управління

Рисунок 3 – Визначення параметрів об’єкта за каналом управління
першого збурення, встановивши: Kz1=1; Kz2=0; Kk=0.
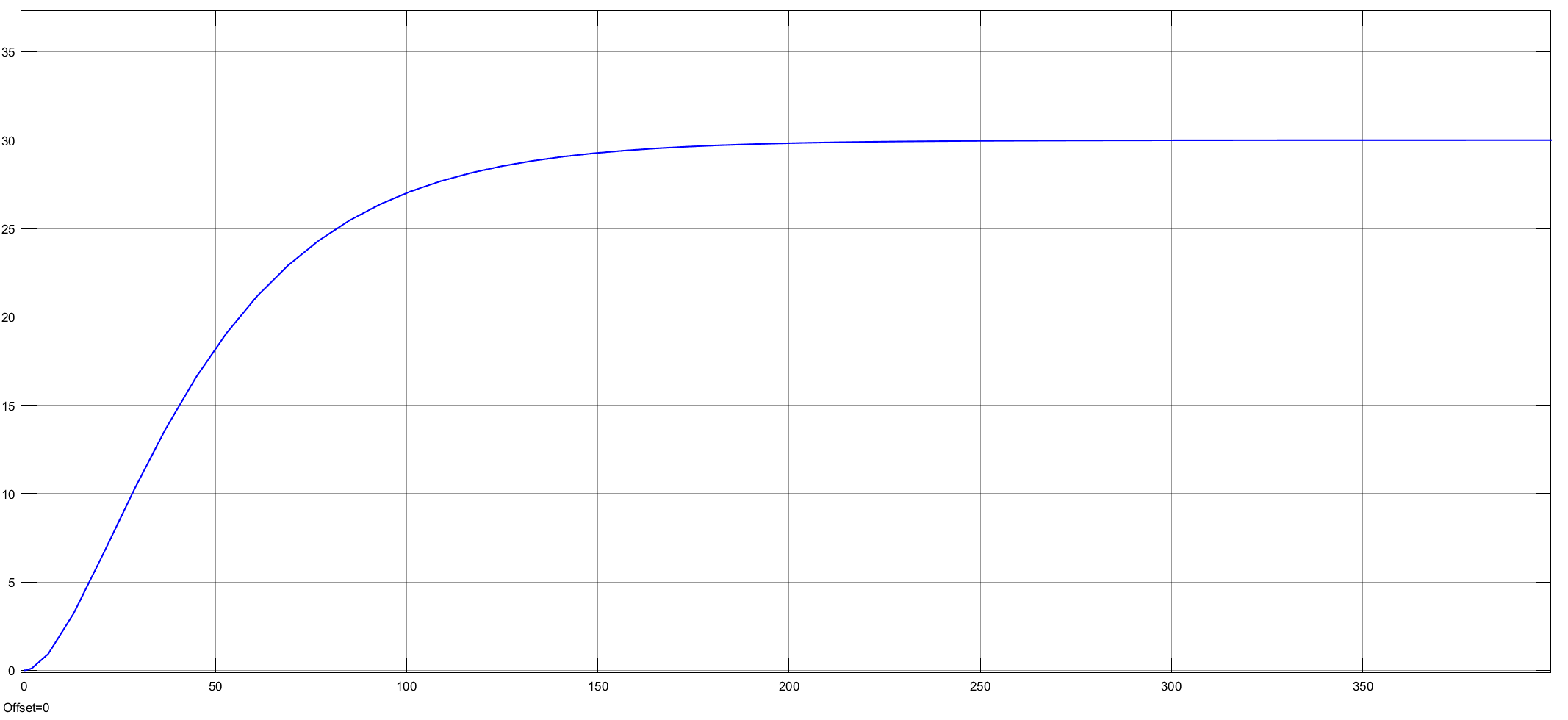
Рисунок 4 – Перехідний процес об’єкта за каналом першого збурення

Рисунок 5 – Визначення параметрів об’єкта за каналом першого збурення
другого збурення, встановивши: Kz1=0; Kz2=1; Kk=0.
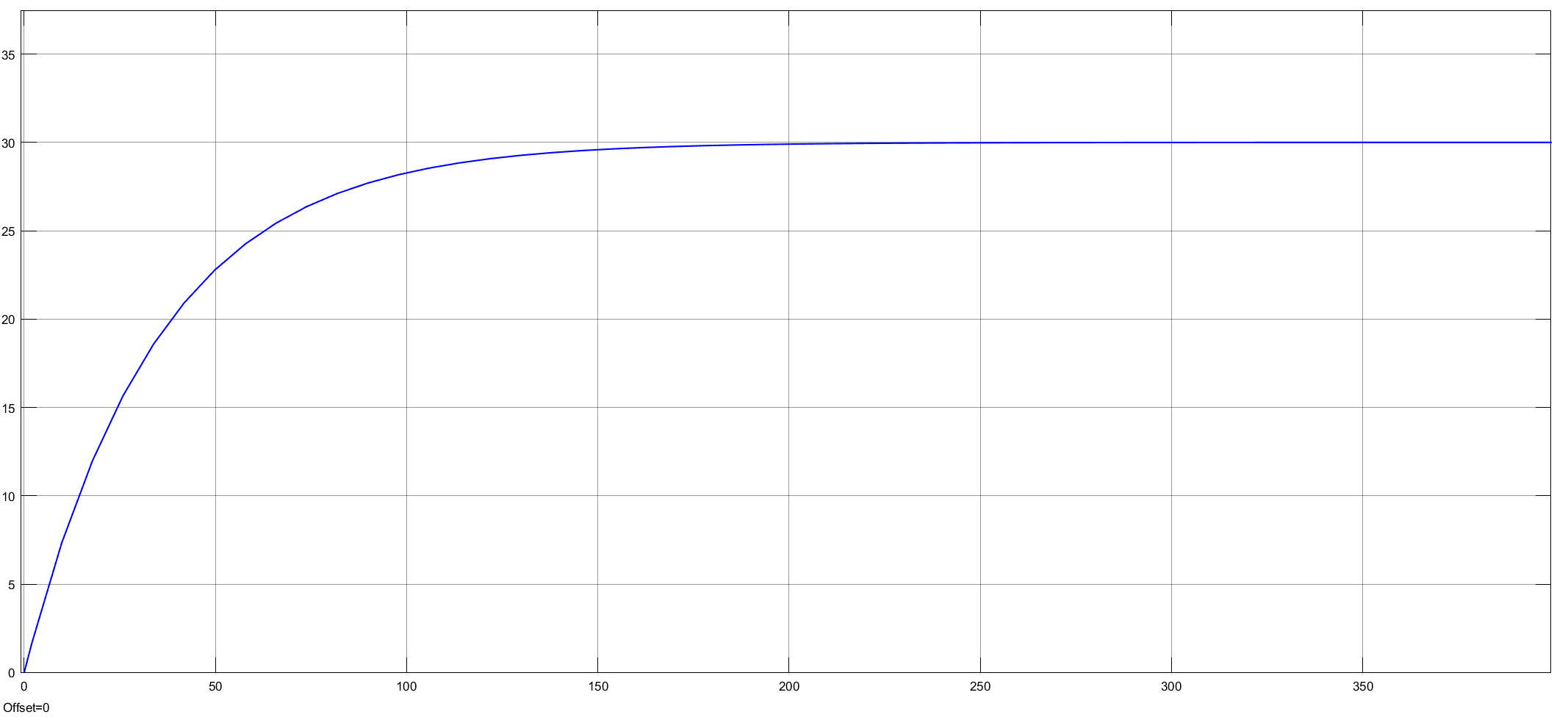
Рисунок 6 – Перехідний процес об’єкта за каналом другого збурення
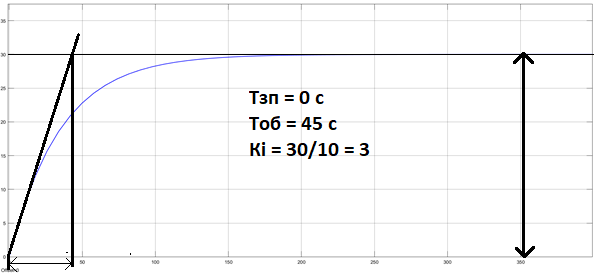
Рисунок 7 – Визначення параметрів об’єкта за каналом другого збурення
2. Дослідження розімкненої САР за каналом першого збурення.

Рисунок 8 – Перехідний процес об’єкта за каналом першого збурення з компенсатором
При значенні Кк=-0,667 якість перехідного процесу була найкраща.
Дослідження розімкненої САР за каналом першого збурення за умови зміни завдання.

Рисунок 9 – Перехідний процес об’єкта за каналом першого збурення за умови зміни завдання з компенсатором
При значенні Кк=-1.4445 якість перехідного процесу була найкраща.
Дослідження розімкненої САР за умові дії першого і другого збурень.
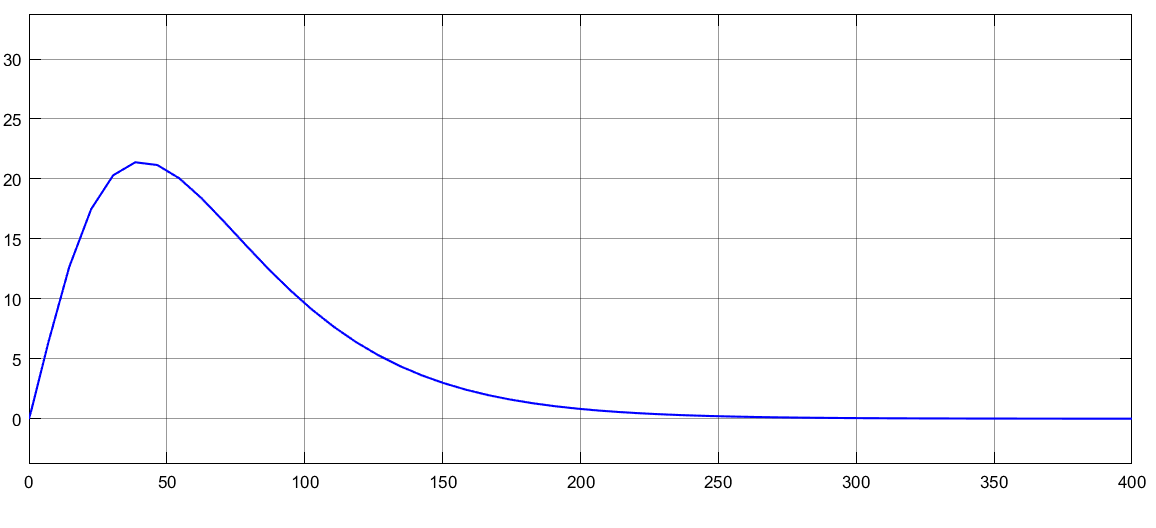
Рисунок 10 – Перехідний процес об’єкта за каналом першого і другого збурень з компенсатором
При значенні Кк=-1.333 якість перехідного процесу була найкраща.
Дослідження замкненої САР за відхиленням за умови дії першого збурення.

Рисунок 11 – Перехідний процес об’єкта за відхиленням за умови дії першого збурення
При значенні Кі=0.025 та Крег=0.01, оцінка якості перехідного процесу має такі значення:
Динамічна помилка регулювання – А1=15,3.
Статична помилка регулювання – ΔХст =0.15.
Час регулювання – 650 сек.
Перерегулювання
 .
.Ступінь загасання
 .
.
Дані значення задовольняють умову якості перехідного процесу.
Дослідження замкненої САР за відхиленням за умови дії першого і другого збурення.
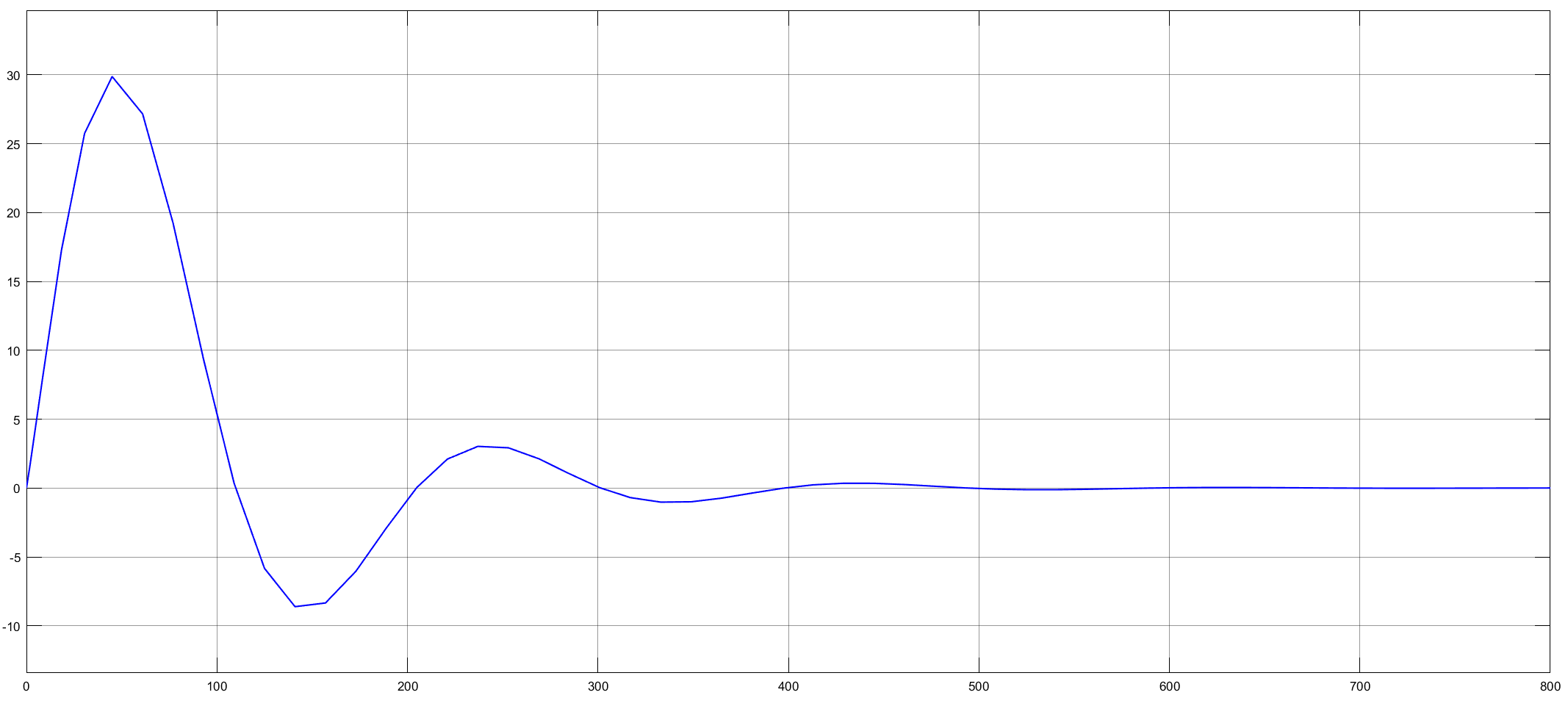
Рисунок 12 – Перехідний процес об’єкта за відхиленням за умови дії першого і другого збурення
При значенні Кі=0.025 та Крег=0.1 , оцінка якості перехідного процесу має такі значення:
Динамічна помилка регулювання – А1=29.9.
Статична помилка регулювання – ΔХст =0.1.
Час регулювання – 550 сек.
Перерегулювання
 .
.Ступінь загасання
 .
.
Дані значення задовольняють умову якості перехідного процесу.
Дослідження комбінованої САР за відхиленням за умови дії першого збурення.

Рисунок 13 – Перехідний процес комбінованої САР за відхиленням за умови дії першого збурення
При значенні Кі=0.02, Крег=0.01 та Кк=-0,667, оцінка якості перехідного процесу має такі значення:
Динамічна помилка регулювання – А1=7.1.
Статична помилка регулювання – ΔХст =0.07.
Час регулювання – 600 сек.
Перерегулювання
 .
.Ступінь загасання

Дані значення задовольняють умову якості перехідного процесу.
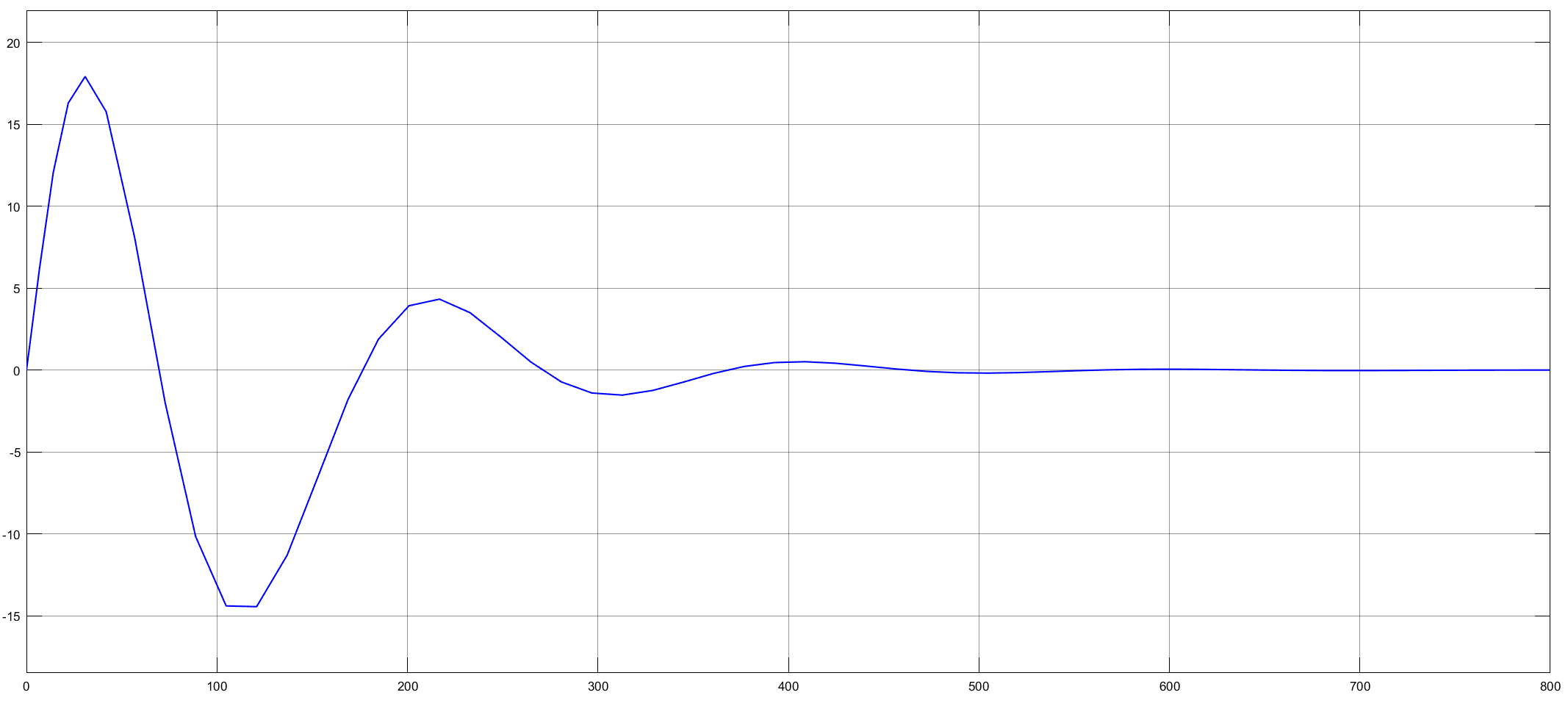
Рисунок 14 – Перехідний процес комбінованої САР за відхиленням за умови дії першого та другого збурення
При значенні Кі=0.025, Крег=0.1 та Кк=-1,333, оцінка якості перехідного процесу має такі значення:
Динамічна помилка регулювання – А1=17.9.
Статична помилка регулювання – ΔХст =0.06.
Час регулювання – 650 сек.
Перерегулювання
 .
.Ступінь загасання
 .
.
Дані значення задовольняють умову якості перехідного процесу.
Висновок: принцип керування за відхиленням є універсальним і ефективним, оскільки він дозволяє враховувати всі впливи на об'єкт (всіх збурень і завад), управляти складними об'єктами, а також здійснювати необхідний закон зміни керованої величини з допустимо малим відхиленням (помилкою) незалежно від того, якими причинами воно викликане.
Основна перевага систем за збуренням — висока швидкодія кіл компенсації, оскільки система реагує безпосередньо на причину, а не на наслідок, тобто регулятор починає працювати в момент виникнення збурення на вході в об'єкт керування. Недолік розімкнутих САР — реакція тільки на основні збурення, які можна виміряти, і нереагування на завади (другорядні впливи).
Сучасні автоматичні системи високої точності звичайно будують на основі принципу комбінованого керування, що поєднує в собі принципи керування за відхиленням і за збуренням. Принцип комбінованого керування вільний від недоліків САР за відхиленням і збуренням і поєднує їх переваги.
За результатами моделювання було визначено, що комбінована система має меншу динамічну похибку, статичну помилку регулювання, час регулювання і ступінь загасання, але має більший відсоток перерегулювання.